Implement global path planner as a ROS plugin
Sep 2023 »Intro
Goal
Implement path planning algorithm as a global path planner.
Given
- a 2D costmap of the environment
- the start pose (i.e., the current pose)
- the goal pose
The path planner would generate the global plan for the desired movement.
Move_base
ROS navigation stack handles the navigation, from building the map, localization, and path planning.
The move_base node is a main component of the navigation stack. It subscribes to all essential informations for path planning (ex: tf, odom, map, sensor topics, and the goal pose), and plan the path with its global planner & local planner, then publishes the planned result as a series of velocity commands (/cmd_vel), which would be sent to the controller.
There are multiple built-in global path planners provided, such as the default: NavfnROS. In order to let the move_base node use our own path planning alrgothm, it needs to be written as a ROS Plugin.
Implement global path planner as ROS plugin
There is a ROS Wiki tutorial on this topic.
Generally, the idea is as follows:
1. Implement the path planner class
The path planner needs to be implemented as a C++ class (See Side Note 2 for python implementation), overriding the nav_core::BaseGlobalPlanner.
Two functions need to be overriden:
- void initialization(…)
- bool makePlan(…): where the main algorithm lies in. The planned result is stored in the
std::vector<geometry_msgs::PoseStamped>& plan
For instance, I can defined a “MyGlobalPlanner” class in my_global_planner.cpp
class MyGlobalPlanner : public nav_core::BaseGlobalPlanner{
MyGlobalPlanner();
MyGlobalPlanner(std::string name, costmap_2d::Costmap2DROS* costmap_ros);
void initialize(std::string name, costmap_2d::Costmap2DROS* costmap_ros){
//do some initialization.....
//ex: read costmap info
}
bool makePlan(const geometry_msgs::PoseStamped& start,
const geometry_msgs::PoseStamped& goal,
std::vector<geometry_msgs::PoseStamped>& plan){
//main planning algotihm...
//store result in plan
}
}
2. Register the class as plugin
Then we need to register this planner as plugin for nav_core::BaseGlobalPlanner of the move_base.
Add the following to the beginning of the .cpp file where the class is defined. The planner_class_name is the name of the planner class.
//PLUGINLIB_EXPORT_CLASS(${planner_class_name}, nav_core::BaseGlobalPlanner)
//for instance:
PLUGINLIB_EXPORT_CLASS(my_global_planner, nav_core::BaseGlobalPlanner)
3. Compile the planner library
catkin_make compiles the catkin workspace and generates binary files. To compile the planner library, we need to add the following to the CMakeLists.txt.
After compiling, the library file would be stored as /catkin_ws/devel/lib/lib${your_library_name}.so
#add_library(${your_library_name} src/${name_of_you_cpp_file}.cpp)
#for instance: the binary file - libmy_global_planner_lib.so
add_library(my_global_planner_lib src/my_global_planner.cpp)
4. Add a description of the plugi
The plugin description file stores all the important information about a plugin in a machine readable format. It defines
- the library the plugin is in,
- the name of the plugin,
- the type of the plugin
Here I name the xml as - mgp_plugin.xml. Within this file:
<library path="lib/libmy_global_planner_lib">
<class name="my_global_planner/MyGlobalPlanner" type="my_global_planner::MyGlobalPlanner" base_class_type="nav_core::BaseGlobalPlanner">
<description>
A global planner plugin.
</description>
</class>
</library>
Note that the library path needs to match with the library file (with the “lib” prefix) in step 3.
5. Register the plugin
In order to let pluginlib to discover this plugin automatically, we need to explicitly export the plugin.
In CMakeLists.txt, add:
<export>
<nav_core plugin="${prefix}/mgp_plugin.xml" />
</export>
- As always, we would also need to add all the required dependencies (ex: nav_core, pluginlib) in the CMakeLists.txt and package.xml.
Final file structure
The package would be finally structured as below:
my_global_planner
├── CMakeLists.txt
├── include
│ └── my_global_planner
│ ├── astar.h
│ ├── dijkstra.h
│ ├── my_global_planner.h
│ └── utils.h
│── src
│ ├── astar.cpp
│ ├── dijkstra.cpp
│ ├── my_global_planner.cpp
│ └── utils.cpp
├── mgp_plugin.xml
├── package.xml
Result
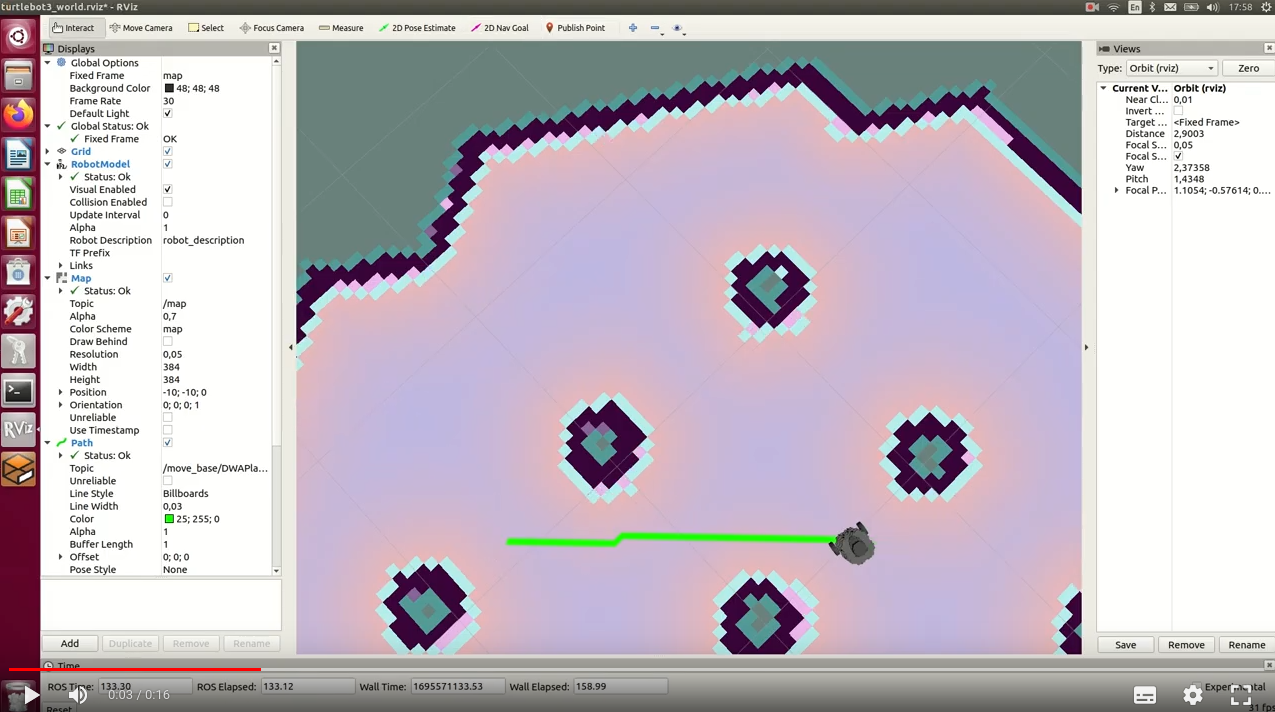
The plugin would generate the global plan, and we can specifying which algorithms to use in the makePlan function.
Currently A* and Dijkstra algorithms are avaialble. A sample running of Dijkstra planner:
Side note
1. Global vs. local planner
Conceptual wise,
- global planner plans a long term path around obstacles
- local planner adds smoothing (collision check) to the global plan, based on real-time sensor data. It produces the final velocity command that is sent to the controller.
The parameters
- planner_frequency: how frequent the global planner replans, in case of new obstacles and changes in environment.
- controller_frequency: how frequent the local planner produce velocity command (/cmd_vel)
2. Python implementations of path planning algorithm
As from my current understanding, the global planner plugin needs to be written as C++ class and adheres to the navcore::BaseGlobalPlanner, as described in step 1.
However, there are still certain ways to use a planning algorithm implemented in Python. For instance, we can write the python-based planning algo as a ROS service server, and create the corresponding service client in the C++ class. The makePlan method would call the ROS service whenever a goal pose is given. The request would contain all essential information for planning, and the service server would send back the planning result in the response.
3. Header files
To switch between different planning algorithms, I implemented the functions separately in different files, which would be called within the makePlan function of the plugin class (MyGlobalPlanner::makePlan).
Since they are in different files, we need to include the header files of the algorithms. I found it a little bit tricky to deal with header files for both ROS nodes and plugins. So I wrote another note for this topic.
For our current example, the my_global_planner.cpp is where the plugin class defined, and it calls the “astar” and “dijkstra” functions from the astar.cpp and dijkstra.cpp. So when compiling the plugin as a library (in step 3), we also need to add those .cpp files (instead of .h) as sources.
set(MY_GLOBAL_PLANNER_LIB_SOURCE
src/my_global_planner.cpp
src/utils.cpp
src/astar.cpp
src/dijkstra.cpp
)
add_library(my_global_planner_lib ${MY_GLOBAL_PLANNER_LIB_SOURCE})
Reference:
- ROS Wiki - move_base
- ROS Wiki - Write ROS Plugin
- ROS Wiki - Write global path planner as ROS Plugin
- Global and local path planning
- Path planner plugin in python